Las traducciones son generadas a través de traducción automática. En caso de conflicto entre la traducción y la version original de inglés, prevalecerá la version en inglés.
Introducción al paralelismo de modelos
El paralelismo de modelos es un método de entrenamiento distribuido en el que el modelo de aprendizaje profundo se divide en varios dispositivos, dentro de las instancias o entre ellas. Esta página de introducción proporciona una descripción general de alto nivel sobre el paralelismo de modelos, una descripción de cómo puede ayudar a superar los problemas que surgen al entrenar modelos DL que suelen ser de un tamaño muy grande y ejemplos de lo que ofrece la biblioteca de modelos SageMaker paralelos para ayudar a gestionar las estrategias de modelos paralelos, así como el consumo de memoria.
¿Qué es el paralelismo de modelos?
Al aumentar el tamaño de los modelos de aprendizaje profundo (capas y parámetros), se obtiene mayor precisión en tareas complejas, como la visión artificial y el procesamiento del lenguaje natural. Sin embargo, existe un límite en el tamaño máximo de modelo que puede caber en una sola GPU. Al entrenar modelos de DL, las limitaciones de memoria de la GPU pueden ser cuellos de botella de las siguientes maneras:
-
Limitan el tamaño del modelo que se puede entrenar, ya que el consumo de memoria de un modelo se amplía proporcionalmente al número de parámetros.
-
Limitan el tamaño del lote por GPU durante el entrenamiento, lo que reduce el uso de la GPU y la eficiencia del entrenamiento.
Para superar las limitaciones asociadas con el entrenamiento de un modelo en una sola GPU, SageMaker proporciona la biblioteca de modelos parallel para ayudar a distribuir y entrenar los modelos DL de manera eficiente en varios nodos de procesamiento. Además, con la biblioteca, puede lograr un entrenamiento distribuido más optimizado mediante EFA-supported dispositivos, que mejoran el rendimiento de la comunicación entre nodos con baja latencia, alto rendimiento y omisión del sistema operativo.
Calcule los requisitos de memoria antes de utilizar el paralelismo de modelos
Antes de utilizar la biblioteca de SageMaker modelos parallel, tenga en cuenta lo siguiente para hacerse una idea de los requisitos de memoria necesarios para el entrenamiento de modelos DL de gran tamaño.
Para un trabajo de entrenamiento que utilice los optimizadores AMP (FP16) y Adam, la memoria de GPU necesaria por parámetro es de unos 20 bytes, que podemos desglosar de la siguiente manera:
-
Un parámetro FP16: ~2 bytes
-
Un gradiente de FP16: ~2 bytes
-
Un optimizador FP32 tiene un estado de ~8 bytes basado en los optimizadores Adam
-
Una copia FP32 del parámetro de ~4 bytes [necesaria para la operación
optimizer apply(OA)] -
Una copia FP32 del gradiente de ~4 bytes (necesaria para la operación OA)
Incluso para un modelo DL relativamente pequeño con 10 000 millones de parámetros, puede requerir al menos 200 GB de memoria, que es mucho más grande que la memoria típica de una GPU (por ejemplo, la NVIDIA A100 con 40GB/80GB memoria y la V100 con 16/32 GB) disponible en una sola GPU. Tenga en cuenta que, además de los requisitos de memoria para los estados del modelo y del optimizador, hay otros consumidores de memoria, como las activaciones que se generan en la transferencia directa. La memoria requerida puede superar con creces los 200 GB.
Para el entrenamiento distribuido, le recomendamos que utilice instancias P3 y P4 de Amazon EC2 que tengan GPU NVIDIA V100 y A100 Tensor Core, respectivamente. Para obtener más información sobre especificaciones como los núcleos de la CPU, la RAM, el volumen de almacenamiento adjunto y el ancho de banda de la red, consulte la sección Computación acelerada de la página Tipos de instancias de Amazon EC2
Incluso con las instancias de computación acelerada, es obvio que los modelos con unos 10 mil millones de parámetros, como Megatron-LM el T5, e incluso los modelos más grandes con cientos de miles de millones de parámetros, GPT-3 no pueden caber réplicas de modelos en cada dispositivo de GPU.
Cómo emplea la biblioteca el paralelismo de modelos y las técnicas de ahorro de memoria
La biblioteca consta de varios tipos de funciones de paralelismo de modelos y funciones de ahorro de memoria, como la fragmentación del estado del optimizador, los puntos de control de activación y la descarga de la activación. Todas estas técnicas se pueden combinar para entrenar de manera eficiente modelos grandes que constan de cientos de miles de millones de parámetros.
Temas
Paralelismo de datos fragmentados (disponible para) PyTorch
El paralelismo de datos partidos es una técnica de entrenamiento distribuido que ahorra memoria y que divide el estado de un modelo (parámetros del modelo, gradientes y estados del optimizador) entre las GPU de un grupo de paralelismo de datos.
Puede aplicar el paralelismo de datos partidos a su modelo como estrategia independiente. Además, si utiliza las instancias de GPU de mayor rendimiento equipadas con las GPU NVIDIA A100 Tensor Core, ml.p4d.24xlarge, puede aprovechar la velocidad de entrenamiento mejorada gracias a la operación AllGather ofrecida por SMDDP Collectives.
Para profundizar en el paralelismo de datos partidos y aprender a configurarlo o utilizar una combinación del paralelismo de datos fragmentados con otras técnicas, como el paralelismo de tensores y el entrenamiento con FP16, consulte Paralelismo de datos partidos.
PyTorch TensorFlowParalelismo de canalización (disponible para y para)
El paralelismo de canalización divide el conjunto de capas u operaciones en el conjunto de dispositivos, dejando intacta cada operación. Al especificar un valor para el número de particiones del modelo (pipeline_parallel_degree), el número total de GPU (processes_per_host) debe ser divisible por el número de particiones de modelos. Para configurarlo correctamente, debe especificar los valores correctos de los parámetros pipeline_parallel_degree y processes_per_host. La matemática simple es la siguiente:
(pipeline_parallel_degree) x (data_parallel_degree) = processes_per_host
La biblioteca se encarga de calcular el número de réplicas del modelo (también denominadas data_parallel_degree) teniendo en cuenta los dos parámetros de entrada que usted proporciona.
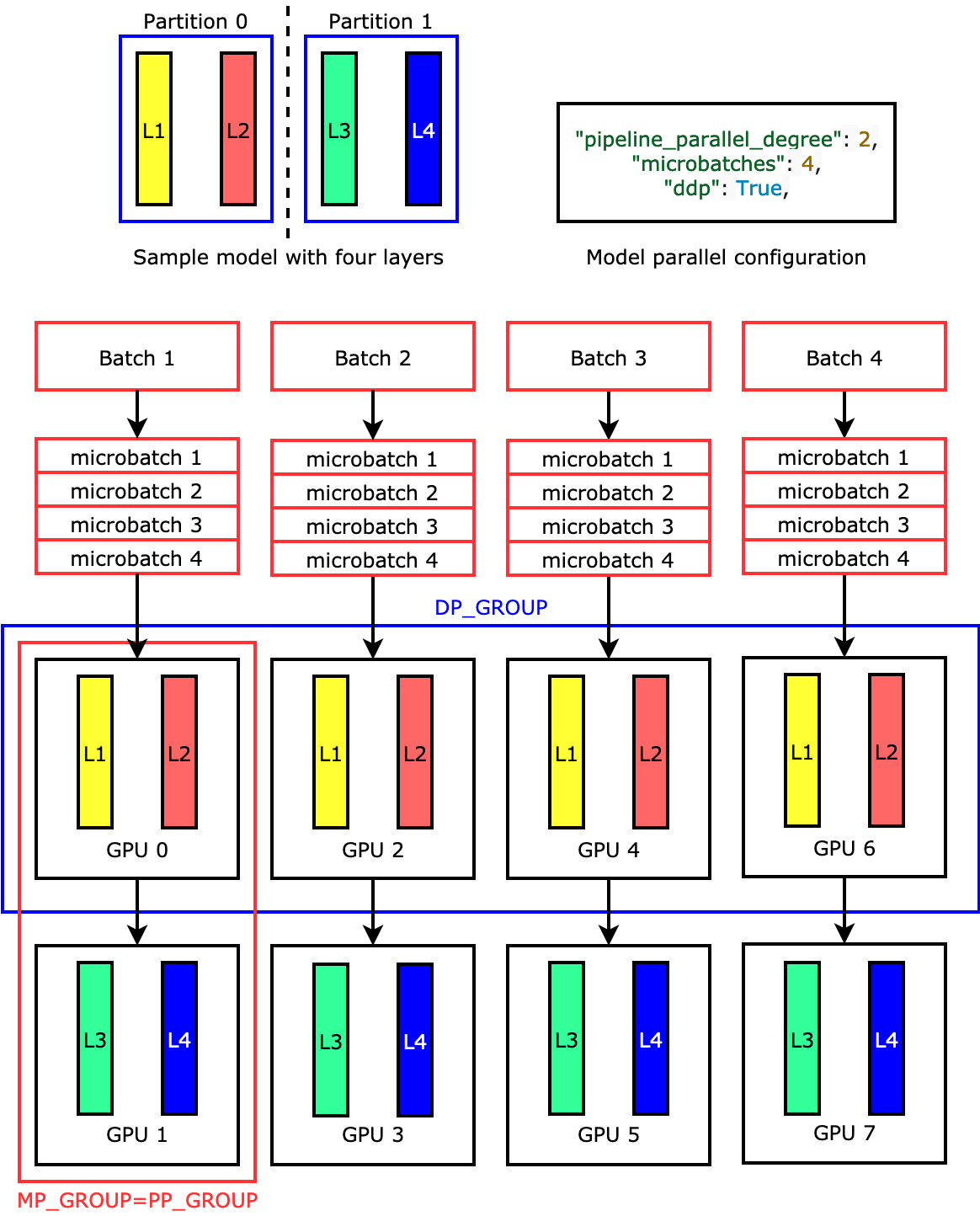
Por ejemplo, si establece "pipeline_parallel_degree": 2 y "processes_per_host": 8 para utilizar una instancia de machine learning con ocho procesadores de GPU comoml.p3.16xlarge, la biblioteca configura automáticamente el modelo distribuido entre las GPU y el paralelismo de datos cuádruple. La siguiente imagen ilustra cómo se distribuye un modelo en las ocho GPU, logrando un paralelismo de datos de cuatro vías y un paralelismo de canalización de dos vías. Cada réplica del modelo, donde la definimos como un grupo de paralelismo de canalización y la etiquetamos como PP_GROUP, está dividida en dos GPU. Cada partición del modelo se asigna a cuatro GPU, donde las cuatro réplicas de particiones se encuentran en un grupo de paralelismo de datos y se etiquetan como DP_GROUP. Sin paralelismo de tensores, el grupo de paralelismo de canalizaciones es esencialmente el grupo de paralelismo de modelos.
Para profundizar en el paralelismo de las canalizaciones, consulte Características principales de la biblioteca de paralelismo de SageMaker modelos.
Para empezar a ejecutar el modelo mediante el paralelismo de canalización, consulte Ejecutar un trabajo de SageMaker entrenamiento distribuido con la biblioteca paralela de SageMaker modelos.
Paralelismo tensorial (disponible para) PyTorch
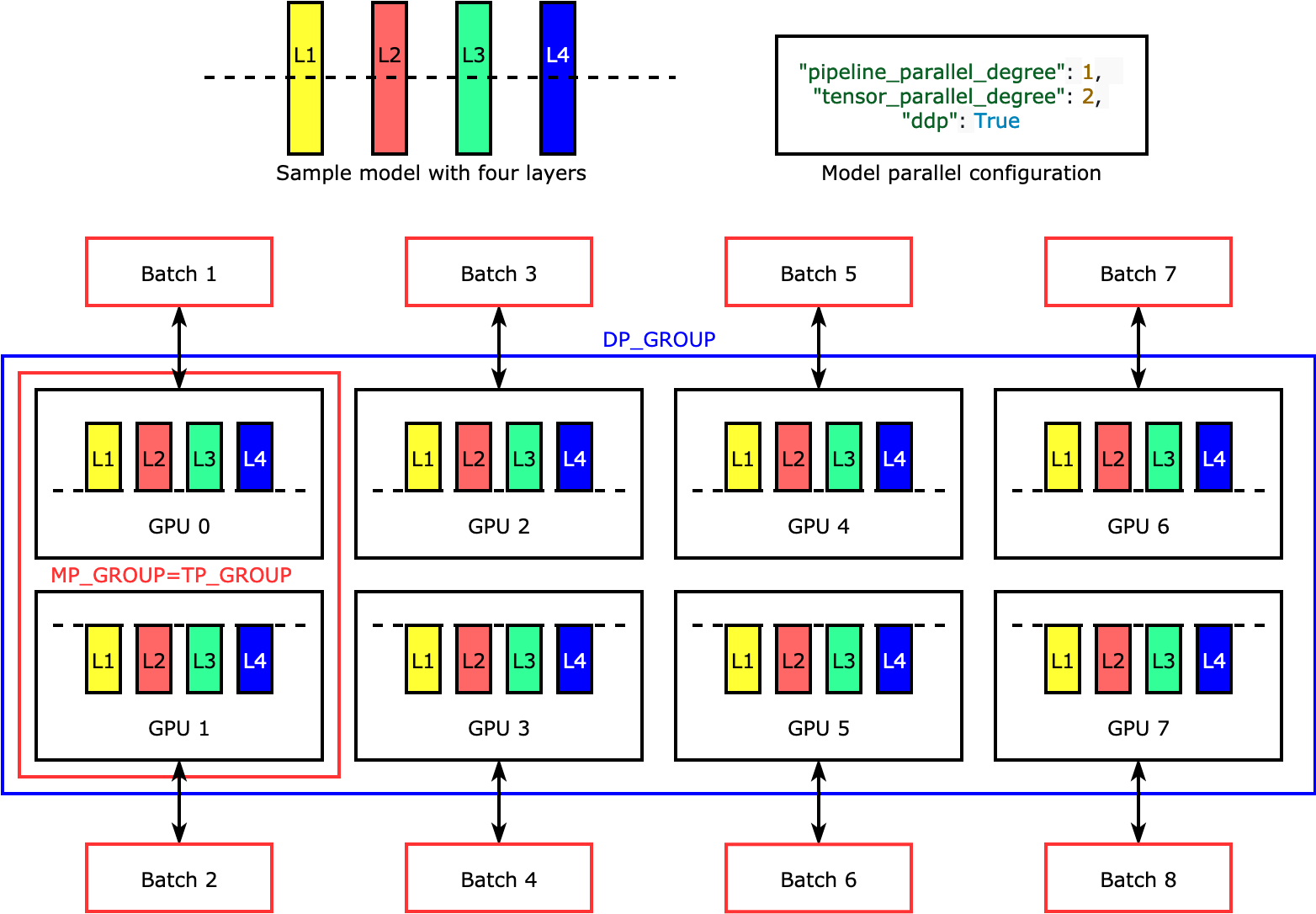
El paralelismo de tensores divide capas individuales onn.Modules, entre dispositivos, para que se ejecuten en paralelo. La siguiente figura muestra el ejemplo más simple de cómo la biblioteca divide un modelo con cuatro capas para lograr un paralelismo de tensores bidireccional ("tensor_parallel_degree": 2). Las capas de cada réplica del modelo están divididas en dos y distribuidas en dos GPU. En este caso de ejemplo, la configuración paralela del modelo también incluye "pipeline_parallel_degree": 1 y "ddp": True (usa el PyTorch DistributedDataParallel paquete en segundo plano), por lo que el grado de paralelismo de los datos pasa a ser ocho. La biblioteca gestiona la comunicación entre las réplicas del modelo distribuido por tensores.
La utilidad de esta función reside en el hecho de que puede seleccionar capas específicas o un subconjunto de capas para aplicar el paralelismo de tensores. Para profundizar en el paralelismo tensorial y otras funciones que ahorran memoria y aprender a configurar una combinación de paralelismo tensorial y de canalización PyTorch, consulte. Paralelismo de tensores
Optimizador PyTorch de fragmentación de estados (disponible para)
Para entender cómo la biblioteca realiza la partición del estado del optimizador, considere un modelo de ejemplo simple con cuatro capas. La idea clave para optimizar la partición de estados es que no es necesario replicar el estado del optimizador en todas las GPU. En cambio, una única réplica del estado del optimizador se divide en rangos de datos paralelos, sin redundancia entre los dispositivos. Por ejemplo, la GPU 0 mantiene el estado del optimizador para la capa uno, la siguiente GPU 1 mantiene el estado del optimizador para la capa 2, y así sucesivamente. La siguiente figura animada muestra una propagación hacia atrás con la técnica de partición del estado del optimizador. Al final de la propagación hacia atrás, hay tiempo de cálculo y de red para que la operación optimizer apply (OA) actualice los estados del optimizador y la operación all-gather (AG) para actualizar los parámetros del modelo para la siguiente iteración. Y lo que es más importante, la operación reduce puede superponerse con el procesamiento de la GPU 0, lo que resulta en una mayor eficiencia de la memoria y una propagación hacia atrás más rápida. En la implementación actual, las operaciones de AG y OA no se superponen con compute. Esto puede provocar un cálculo prolongado durante la operación de AG, por lo que podría haber una compensación.
Para obtener más información acerca de cómo utilizar esta función, consulte Partición del estado del optimizador.
Activación, descarga y puntos de control (disponible para) PyTorch
Para ahorrar memoria en la GPU, la biblioteca admite puntos de control de activación para evitar almacenar las activaciones internas en la memoria de la GPU para los módulos especificados por el usuario durante la transferencia. La biblioteca vuelve a calcular estas activaciones durante la pasada hacia atrás. Además, la función de descarga de activaciones transfiere las activaciones almacenadas a la memoria de la CPU y las recupera en la GPU durante la transferencia hacia atrás para reducir aún más el consumo de memoria de activación. Para obtener más información sobre cómo utilizar estas características, consulte Puntos de control de activación y Descarga de activación.
Elegir las técnicas adecuadas para su modelo
Para obtener más información sobre cómo elegir las técnicas y configuraciones correctas, consulte las prácticas recomendadas de SageMaker Distributed Model Parallel y los consejos y dificultades de configuración.
